Радиолокация: зарождение и развитие
Содержание:
- Охота на «стелс» и гиперзвук
- Принцип действия
- Примечания
- Эстафета переходит в Германию
- * * *
- Основные параметры систем
- Физика процесса: эффект Доплера, или «умное эхо»
- Связь с другими отраслями науки
- Радар на борту
- Радиоастрономия
- Алгоритм определения дальности и направления
- Опыты с электромагнитными волнами Г.Герца и А.Попова
- Мобильные телефоны
Охота на «стелс» и гиперзвук
На практике «Резонанс-НЭ» способна обнаруживать широкий класс воздушных целей — самолёты стратегической и оперативно-тактической авиации, вертолёты, крылатые и баллистические ракеты, аэростаты. Однако основной «специализацией» отечественной станции являются самолёты-невидимки, крылатые ракеты и гиперзвуковые изделия.
В РЛС реализован принцип резонансного отражения радиоволн, который приводит к резкому увеличению показателя эффективной отражающей поверхности (ЭОП) воздушных объектов. Таким образом система безошибочно фиксирует летательные аппараты, выполненные по технологии «стелс», и передаёт данные по ним на огневые средства поражения.

- Слайд из презентации ЗАО НИЦ «Резонанс»
По расчётам московских инженеров, ЭОП типичной крылатой ракеты для радаров, использующих эффект Релея, составляет порядка 0,05 кв. м, а для «Резонанса-НЭ» — 15 кв. м.
«Указанное явление делает неэффективной технологию «стелс» и практически снимает вопрос с малозаметностью таких воздушных объектов, как (американские. — RT) самолёты F-117, B-2, F-35 и аналогичных им», — говорится в материалах ЗАО НИЦ «Резонанс».
Ситуация с обнаружением и сопровождением гиперзвуковых объектов более сложная, отметил в беседе с RT генеральный директор предприятия Иван Назаренко. Однако возможности «Резонанс-НЭ» позволяют решать эту задачу за счёт сокращения до одной секунды темпового обращения к цели (темп обновления информации). На других РЛС этот показатель составляет примерно десять секунд.
Также по теме

Скоростной перехват: какое российское оружие сможет уничтожать гиперзвуковые цели
Российская оборонная промышленность обладает необходимыми ресурсами для создания комплекса перехвата гиперзвуковых аппаратов. Такой…
«Естественно, гиперзвуковое изделие быстро летит, и другие радары попросту не успевают за ним. Наше темповое обращение позволяет своевременно отслеживать такие цели. Гиперзвуковой аппарат попадает в энергетическое поле, которое излучает локатор. Оператор станции может видеть такой объект на экране, он подсвечивается красным цветом», — рассказал Назаренко.
Как пояснил руководитель ЗАО НИЦ «Резонанс», подобная РЛС занимает важную нишу в системе противовоздушной обороны России. По оценке Назаренко, на сегодняшний день отечественная станция является самым надёжным средством передачи информации по гиперзвуковым изделиям на комплексы борьбы с ними.
В беседе с RT замглавы ЗАО НИЦ «Резонанс» доктор технических наук Александр Щербинко обратил внимание на когнитивную функцию РЛС. Она заключается в том, что вычислительное оборудование станции анализирует результаты работы по обнаружению воздушных целей, выявляет ошибки и исправляет их
По его словам, в настоящее время в Арктике развёрнуты пять когнитивных радиолокационных станций. Ещё столько же РЛС «Резонанс-НЭ» появится в российском Заполярье в ближайшие годы. При этом системы, которые поставляются зарубежным государствам, лишены искусственного интеллекта.
«Резонанс-НЭ» может эксплуатироваться практически в любых природно-климатических условиях. Радиолокационная система выдерживает температуру от -50 °С до +60 °С, порывы ветра до 50 м/c, плотность выпадения осадков до 300 мм/ч, влажность до 95% при +25 °С.
Как правило, на местности «Резонанс-НЭ» развёрнут в форме квадрата из четырёх модулей. Однако по желанию заказчика РЛС может быть собрана в одномодульном, двухмодульном или трёхмодульном вариантах с секторами обзора 90°, 180° и 270° соответственно.

- Экспортная РЛС «Резонанс-НЭ» в одной из зарубежных стран
Принцип действия
Радиолокация основана на следующих физических явлениях:
- Радиоволны рассеиваются на встретившихся на пути их распространения электрических неоднородностях (объектами с другими электрическими свойствами, отличными от свойств среды распространения). При этом отражённая волна, также, как и собственно, излучение цели, позволяет обнаружить цель.
- На больших расстояниях от источника излучения можно считать, что радиоволны распространяются прямолинейно и с постоянной скоростью, благодаря чему имеется возможность измерять дальность и угловые координаты цели (Отклонения от этих правил, справедливых только в первом приближении, изучает специальная отрасль радиотехники — Распространение радиоволн. В радиолокации эти отклонения приводят к ошибкам измерения).
- Частота принятого сигнала отличается от частоты излучаемых колебаний при взаимном перемещении точек приёма и излучения (эффект Доплера), что позволяет измерять радиальные скорости движения цели относительно РЛС.
- Пассивная радиолокация использует излучение электромагнитных волн наблюдаемыми объектами, это может быть тепловое излучение, свойственное всем объектам, активное излучение, создаваемое техническими средствами объекта, или побочное излучение, создаваемое любыми объектами с работающими электрическими устройствами.
Примечания
- . TheFreeDictionary.com. Дата обращения 30 декабря 2015.
- Translation Bureau. . Public Works and Government Services Canada (2013). Дата обращения 8 ноября 2013.
- McGraw-Hill dictionary of scientific and technical terms / Daniel N. Lapedes, editor in chief. Lapedes, Daniel N. New York ; Montreal : McGraw-Hill, 1976. , 1634, A26 p.
- , с. 13.
- .
- Angela Hind. . BBC News (5 февраля 2007).
- ↑ .
- ↑ Справочник по радиоэлектронным системам / под ред. Б. В. Кривицкого. — М.: Энергия, 1979. — Т. 2. — С. 75—206. — 368 с.
- , с. 15—17.
-
Слюсар, В.И. . Разделы 9.3 – 9.8 в книге «Широкополосные беспроводные сети передачи информации». / Вишневский В.М., Ляхов А.И., Портной С.Л., Шахнович И.В. – М.: Техносфера. – 2005. C. 498 – 569 (2005).
-
Слюсар, В.И. . Электроника: наука, технология, бизнес. – 2001. – № 3. C. 42 – 46. (2001).
- Слюсар, В.И. (недоступная ссылка). Специальная техника и вооружение. – Февраль, 2002. – № 1,2. С. 17 – 23. (2002). Дата обращения 7 августа 2017.
- В. Г. Дождиков, Ю. С. Лифанов, М. И. Салтан ; под ред. В. Г. Дождикова. Энциклопедический словарь по радиоэлектронике, оптоэлектронике и гидроакустике / В. Г. Дождиков. — Москва: Энергия, 2008. — С. 600. — 611 с. — ISBN 978-5-98420-026-4 (В пер.).
Эстафета переходит в Германию
В 1904 году немец Христиан Хюльсмейер запатентовал устройство под названием телемобилоскоп. Этот прибор предполагалось использовать в судоходстве для обнаружения кораблей в условиях плохой видимости. Телемобилескоп был построен на основе искрового генератора радиоволн и в своей последней версии мог находить суда на расстоянии до 3 км. Однако устройством не заинтересовались ни гражданские, ни военные, предпочитая по старинке пользоваться на судах паровыми ревунами. По сути прибор Хюльсмайера был еще не радаром, а радиодетектором. Существовавшие на тот момент технологии еще не позволяли построить полноценный радиолокатор.
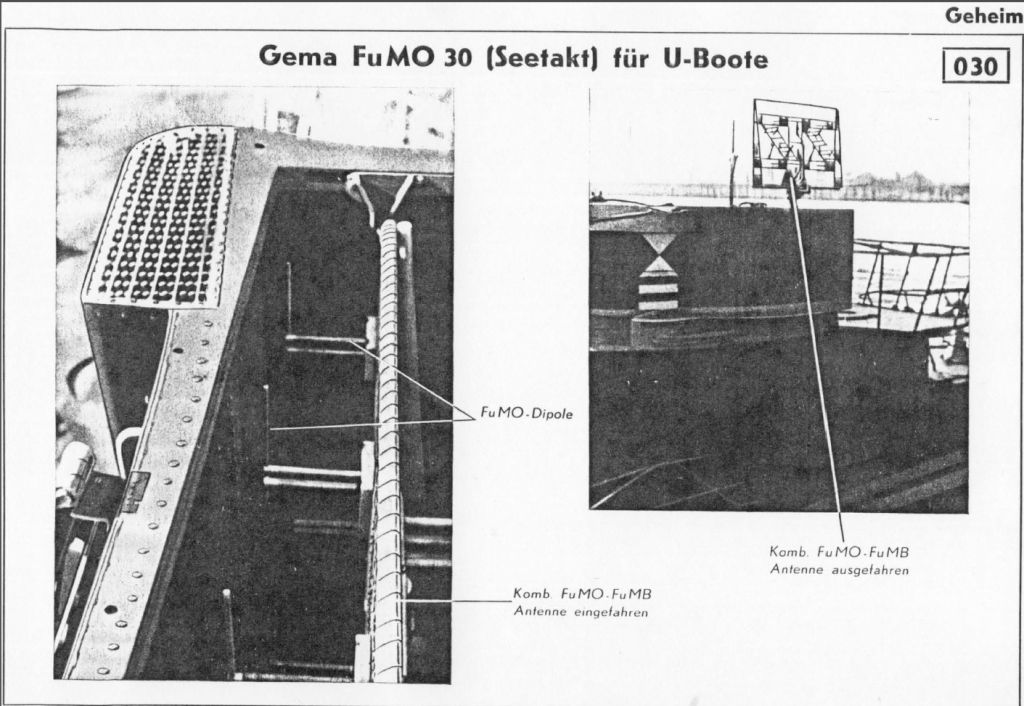
Схема установки антенны радиолокатора «Зеетакт» на немецкой подводной лодке
В 1920-1930-е годы немецкие ученые и инженеры достигли больших успехов в развитии военной радиолокации. В 1935 году физик Рудольф Кунхольд из Института технологий связи германских ВМС представил радиолокационный прибор с электронно-лучевым дисплеем. К концу 1930-х на его основе были созданы оперативные радиолокаторы «Зеетакт» для флота и «Фрейя» для ПВО.
Однако, несмотря на значительные научные результаты, руководство Третьего рейха рассчитывало на блицкриг и не спешило развивать национальную сеть радаров, считая их преимущественно оборонительными средствами. К 1940 году Германия располагала лишь небольшой сетью станций дальнего обнаружения. И только к концу 1943 года территорию Германии полностью накрыли защитным радиолокационным «колпаком».
* * *
Появлением радиолокации можно считать рубеж XIX— XX веков. И по сути, этой области наук чуть больше века, но столь стремительное её развитие привело нас к тому, что мы уже не можем даже и представить своё существование без неё в нашем повседневном быту, что уж говорить о её военном значении. С развитием общества человеческие потребности растут всё больше. Следовательно, перед радиолокацией появляются новые задачи и новые направления, а значит, и усовершенствование методов, оборудования системы радиолокации. Не скоро к данной области будет потерян интерес, который подогревается и научным прогрессом, с одной стороны, и коммерческой заинтересованностью, с другой.
Основные параметры систем
От тактических и технических характеристик оборудования во многом зависит эффективность и качество решаемых задач.
К тактическим показателям РЛС причисляют:
- Зону обзора, ограниченную минимальной и максимальной дальностью обнаружения цели, допустимым азимутальным углом и углом возвышения.
- Разрешающую способность по дальности, азимуту, элевации и скорости (возможность определять параметры рядом расположенных целей).
- Точность измерений, которая измеряется наличием грубых, систематических или случайных ошибок.
- Помехозащищенность и надежность.
- Степень автоматизации извлечения и обработки поступающего потока информационных данных.
Заданные тактические характеристики закладываются при проектировании устройств посредством определенных технических параметров, среди которых:
- несущая частота и модуляция генерируемых колебаний;
- диаграммы направленности антенн;
- мощность передающих и принимающих устройств;
- габаритные размеры и масса системы.
Физика процесса: эффект Доплера, или «умное эхо»
Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн.
Использование радиоволн, или, другими словами, электромагнитных колебаний (ЭМК), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц, определяет основные преимущества радиолокационных систем (РЛС) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми). В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
Основными закономерностями распространения радиоволн, которые позволяют обнаруживать объекты и измерять координаты и параметры их движения, являются следующие:
– постоянство скорости и прямолинейность распространения радиоволн в однородной среде (при проведении инженерных расчетов скорость распространения радиоволн принимают равной 3·10–8 м/с;
– способность радиоволн отражаться от различных областей пространства, электрические или магнитные параметры которых отличаются от аналогичных параметров среды распространения;
– изменение частоты принимаемого сигнала по отношению к частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера, который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.

Доплеровский метеорологический радиолокатор
В 1848 году эффект Доплера был уточнен французским физиком Арманом Физо, а в 1900 году – экспериментально проверен русским ученым Аристархом Белопольским на лабораторной установке. В этой связи в научно-технической литературе наименование данного эффекта можно встретить под названием «эффект Доплера – Белопольского».
Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал. Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость распространения радиосигнала в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения зондирующего сигнала t и момент приема отраженного сигнала от цели t1. В результате разность (t1 – t) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t) в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство 2Д = Сtд, из которого следует, что дальность до объекта (цели) равна Д = Сtд/2.
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tд, которое при известной скорости распространения радиоволн позволяет определить дальность до нее.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т.д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Связь с другими отраслями науки
Основным фактором, ограничивающим технические характеристики локаторов, является малая мощность принимаемого сигнала. При этом мощность принимаемого сигнала убывает как четвёртая степень дальности (то есть, чтобы увеличить дальность действия локатора в 10 раз нужно увеличить мощность передатчика в 10000 раз). Естественно, на этом пути быстро пришли к пределам, преодолеть которые было далеко не просто. Уже в самом начале развития был осознан тот факт, что имеет значение не сама мощность принимаемого сигнала, а его заметность на фоне шумов приёмника. Снижение шумов приёмника также было ограничено естественными шумами элементов приёмника, например тепловыми. Данный тупик был преодолён на пути усложнения методов обработки принятого сигнала и связанного с этим усложнения формы применяемых сигналов. Развитие радиолокации как научной отрасли знаний шло одновременно с развитием кибернетики и теории информации, и потребовались бы специальные исследования, чтобы решить, где именно были получены первые результаты. Следует отметить появление понятия сигнала, который позволил отвлечься от конкретных физических процессов в приёмнике, таких как напряжение и ток, и позволил решать стоящие проблемы как математическую задачу о поиске наилучших функциональных преобразованиях функций времени.
Одной из первых работ в этой области была работа В. А. Котельникова об оптимальном приёме сигнала, то есть наилучшем в условии шумов методе обработки сигнала. В результате было доказано, что качество приёма зависит не от мощности сигнала, а от его энергии, то есть произведения мощности на время, таким образом, появилась доказанная возможность увеличения дальности действия за счёт увеличения длительности сигналов, в пределе до непрерывного излучения. Значительным шагом вперед стало отчётливое применение в технике методов статистической теории решений (критерий Неймана-Пирсона) и принятие того факта, что исправное устройство может работать с определённой долей вероятности. Для того, чтобы радиолокационный сигнал при большой длительности позволял измерять дальность и скорость с высокой точностью, потребовались сложные сигналы, в отличие от простых радиолокационных импульсов, изменяющие какие-либо характеристики в процессе генерации. Так. сигналы с линейной частотной модуляцией изменяют частоту колебаний в течение одного импульса, сигналы с фазовой манипуляцией скачкообразно изменяют фазу сигнала, обычно на 180 градусов. При создании сложных сигналов было сформулировано понятие функции неопределённости сигнала, показывающей связь точности измерений дальности и скорости. Необходимость повышения точности измерения параметров стимулировало развитие различных методов фильтрации результатов измерений, например, методов оптимальной нелинейной фильтрации, которые явились обобщением фильтра Калмана на нелинейные задачи. В итоге всех этих разработок теоретическая радиолокация оформилась как самостоятельная сильно математизированная отрасль знаний, в которой значительную роль имеют формализованные методы синтеза, то есть проектирование ведётся в известной мере «на кончике пера».
С этим читают
Радар на борту
К идее использования радиолокационных средств на самолетах пришли несколько лет спустя после того, как появились первые наземные РЛС. Хотя в системах радионавигации и в приборах «слепой посадки» радиотехнические средства начали применяться уже с 1933 года.
В СССР именно наземная станция «Редут» явилась прототипом первой бортовой радиолокационной станции (БРЛС). Одной из основных проблем стало размещение аппаратуры на самолете – комплект станции с источниками питания и кабелями должен был весить примерно 500 кг. На одноместном истребителе того времени разместить такую аппаратуру было нереально. И выход был найден – разместить станцию было решено не на одноместном самолете, а на двухместном Пе-2.
РЛС «Коршун» на МиГ-17П
Первая отечественная бортовая радиолокационная станция была названа «Гнейс-2», и в июне 1943 года она была принята на вооружение. К концу 1944 года было выпущено более 230 станций «Гнейс-2».
А в победном 1945 году началось серийное производство самолетной радиолокационной станции «Гнейс-5с». Дальность обнаружения цели достигала 7 км. Но главной новинкой этой модификации было то, что начиная с дальности 1,5 км данные воздушной обстановки дублировались на специальном индикаторе, установленном в кабине летчика. Это позволяло пилоту самостоятельно выводить самолет в атаку.
Дальнейшее развитие бортовых РЛС было связано с появлением реактивной авиации. Обнаружить самолеты и крылатые ракеты врага помогали такие установки, как «Изумруд», «Сокол» и «Сапфир» в различных модификациях.
Радиоастрономия
Посланные с поверхности земли радиоволны также отражаются от объектов в ближнем и дальнем космосе, как и от околоземных целей. Многие космические объекты невозможно было полноценно исследовать лишь с использованием оптических инструментов, и только применение радиолокационных методов в астрономии позволило получить богатую информацию об их природе и структуре. Впервые пассивная радиолокация для исследования Луны была применена американскими и венгерскими астрономами в 1946 году. Примерно в то же время были случайно приняты и радиосигналы из космического пространства.
У современных радиотелескопов приемная антенна имеет форму большой вогнутой сферической чаши (подобно зеркалу оптического рефлектора). Чем больше ее диаметр, тем более слабый сигнал антенна сможет принять. Часто радиотелескопы работают комплексно, объединяя не только устройства, расположенные недалеко друг от друга, но и находящиеся на разных континентах. Среди важнейших задач современной радиоастрономии — изучение пульсаров и галактик с активными ядрами, исследование межзвездной среды.
Алгоритм определения дальности и направления
Скорость распространения электромагнитных волн в атмосфере составляет 300 тыс. км/с. Поэтому, зная время, затраченное транслируемым сигналом на преодоление расстояния от станции до цели и обратно, легко вычислить удаленность объекта. Для этого необходимо точно зафиксировать время отправки импульса и момент принятия отраженного сигнала.
Для получения информации о местонахождении цели используется остронаправленная радиолокация. Определение азимута и элевации (угла места или возвышения) объекта производится антенной с узким лучом. Современные РЛС используют для этого фазированные антенные решетки (ФАР), способные задавать более узкий луч и отличающиеся высокой скоростью вращения. Как правило, процесс сканирования пространства совершается минимум двумя лучами.
Опыты с электромагнитными волнами Г.Герца и А.Попова
В 1888 г. выдающийся немецкий учёный Генрих Герц опытным путём подтвердил существование электромагнитных волн. Опыты Герца заключались в отражении луча рефлектора от металлического листа, установленного на его пути. Отражаясь от него, луч попадал к приёмнику и «сигнализировал» о своём существовании. Стоило убрать лист — сигнализация прекращалась.
 Генрих Рудольф Герц
Генрих Рудольф Герц
Герц научился генерировать и улавливать электромагнитные радиоволны и обнаружил, что они по-разному поглощаются и отражаются различными материалами
И прежде всего внимание учёного здесь привлекло само существование известных раннее лишь в теории электромагнитных волн. Но он даже и не задумался о каком-либо практическом применении свойств этих волн — направленности и отражении
Спустя немного времени, наш соотечественник А.С. Попов впервые нашёл практическое применение для электромагнитных волн, создав грозоотметчик (приёмник электромагнитных волн природного происхождения, который лёг в основу появившегося после радио). Позже А.С
Попов сделал ещё одно важное открытие: в 1897 году во время опытов по радиосвязи на Балтийском море зарегистрировал влияние корабля, пересекающего трассу радиоволн, на силу сигнала
В своём отчете о проведении опытов учёный писал следующее:
 Александр Степанович Попов
Александр Степанович Попов
Мобильные телефоны
Радиолокация также используется в сотовой телефонии через базовые станции . Чаще всего это делается посредством трилатерации между радиовышками . Местоположение звонящего или трубки можно определить несколькими способами:
-
угол прихода ( AOA ) требует наличия как минимум двух башен, размещая вызывающего в точке, где пересекаются линии, идущие по углам от каждой башни
- разница во времени прибытия ( TDOA ) соотв. время прибытия ( TOA ) работает с использованием мультилатерации , за исключением того, что именно сети определяют разницу во времени и, следовательно, расстояние от каждой башни (как с сейсмометрами )
- сигнатура местоположения использует « отпечатки пальцев » для хранения и вызова шаблонов (таких как многолучевость), которые, как известно, проявляются сигналы мобильных телефонов в разных местах в каждой ячейке
Первые два зависят от прямой видимости , которая может быть трудной или невозможной в гористой местности или вокруг небоскребов . Однако в этих условиях сигнатуры местоположения работают лучше . Сети TDMA и GSM, такие как Cingular и T-Mobile, используют TDOA.
Сети CDMA, такие как Verizon Wireless и Sprint PCS, как правило, используют технологии радиолокации на основе мобильных телефонов, которые технически более похожи на радионавигацию. GPS — одна из таких технологий.
Композитные решения, требующие как телефонной трубки, так и сети, включают:
- GPS с поддержкой ( беспроводной или ТВ ) позволяет использовать GPS даже в помещении
- Расширенная трилатерация прямого канала ( A-FLT )
- Отчет об измерении времени / сети ( TA / NMR )
- Расширенная наблюдаемая разница во времени ( E-OTD )
Первоначально цель любого из них в мобильных телефонах состоит в том, чтобы точка ответа службы общественной безопасности (PSAP), которая отвечает на звонки на номер телефона службы экстренной помощи, могла знать, где находится звонящий и куда именно следует отправить службы экстренной помощи . Эта возможность известна в NANP ( Северная Америка ) как служба 911 с улучшенной беспроводной связью . Пользователи мобильных телефонов могут иметь возможность разрешить отправку собранной информации о местоположении на другие телефонные номера или сети передачи данных, чтобы помочь людям, которые просто заблудились или нуждаются в других услугах на основе определения местоположения . По умолчанию этот параметр обычно отключен в целях защиты конфиденциальности .