Радиолокация
Содержание:
- Основные параметры систем
- Принцип радиолокации
- «В условиях отсутствия видимости»
- 2.3 Устройство Вторичной РЛС
- Гражданское применение
- Первые радиолокационные устройство
- Журналы и бланки
- Радар на борту
- История развития радиолокации
- * * *
- АФАР и «умная обшивка» для Су-57
- Первые эксперименты: радиоволны в открытом море
- Принцип действия
- Физика процесса: эффект Доплера, или «умное эхо»
- Методы и оборудование
- Расширение возможностей
Основные параметры систем
От тактических и технических характеристик оборудования во многом зависит эффективность и качество решаемых задач.
К тактическим показателям РЛС причисляют:
- Зону обзора, ограниченную минимальной и максимальной дальностью обнаружения цели, допустимым азимутальным углом и углом возвышения.
- Разрешающую способность по дальности, азимуту, элевации и скорости (возможность определять параметры рядом расположенных целей).
- Точность измерений, которая измеряется наличием грубых, систематических или случайных ошибок.
- Помехозащищенность и надежность.
- Степень автоматизации извлечения и обработки поступающего потока информационных данных.
Заданные тактические характеристики закладываются при проектировании устройств посредством определенных технических параметров, среди которых:
- несущая частота и модуляция генерируемых колебаний;
- диаграммы направленности антенн;
- мощность передающих и принимающих устройств;
- габаритные размеры и масса системы.
Принцип радиолокации
Радиотехническое оборудование и средства, предназначенные для выполнения задач радиолокации, получили название радиолокационных систем, или устройств (РЛС или РЛУ). Основы радиолокации базируются на следующих физических явлениях и свойствах:
- В среде распространения радиоволны, встречая объекты с иными электрическими свойствами, рассеиваются на них. Волна, отраженная от цели (или ее собственное излучение), позволяет радиолокационным системам обнаружить и идентифицировать цель.
- На больших расстояниях распространение радиоволн принимается прямолинейным, с постоянной скоростью в известной среде. Это допущение делает возможным измерение дальности до цели и ее угловых координат (с определенной ошибкой).
- На основании эффекта Доплера по частоте принятого отраженного сигнала вычисляют радиальную скорость точки излучения относительно РЛУ.
«В условиях отсутствия видимости»
Как считают эксперты, портативные РЛС зачастую безальтернативны для проведения радиолокационной разведки в труднодоступной местности, куда не может добраться транспорт и военная техника. Одной из самых успешных разработок отечественных инженеров аналитики назвали станцию 1Л227 «Соболятник», созданную в стенах ПАО «НПО «Стрела» (Тула).
«Соболятник» может одновременно автоматически сопровождать до 20 целей и обнаруживать малоразмерные объекты на расстоянии в несколько десятков километров.
Также по теме

«Нет ни у кого в мире»: как новейшая радиолокационная станция усилит возможности российских роботов и БПЛА
Для нужд российской армии создаётся малогабаритная многофункциональная программная радиолокационная станция (РЛС), сообщил начальник…
«Носимая станция объединяет в себе практически все возможности современных радиолокаторов, несмотря на предельно малые габариты и вес всего в 36 кг. Время развёртывания станции не превышает двух минут… 30-метровый кабель «Соболятника», соединяющий монитор с антенной, минимизирует возможности поражения его оператора в случае попытки противника уничтожить комплекс», — говорится в материалах Минобороны РФ.
Самым миниатюрным детищем тульских инженеров является радар ближней разведки «Фара-ВР» массой 12 кг. Данное устройство способно автоматически обнаруживать подвижные цели в радиусе 10 км и передавать их координаты средствам поражения. В частности, станция сопрягается с пулемётами Калашникова (ПКМСН), «Печенег», «Корд», станковыми гранатомётами АГС-17 и АГС-30.
Генеральный директор «Стрелы» Вячеслав Чапкин в своей статье для журнала «Воздушно-космический рубеж» отметил, что «Фара-ВР» незаменима «при ведении боевых действий в условиях отсутствия оптической видимости».
По мнению руководителя предприятия, малогабаритная станция объединяет в себе «практически все возможности современных радиолокаторов».
Ещё одной уникальной разработкой тульских конструкторов является РЛС артиллерийской разведки «Аистёнок». Это первая в мире переносная многофункциональная радиолокационная станция обнаружения огневых позиций стреляющих миномётов, ствольной артиллерии и реактивных систем залпового огня.

- РЛС артиллерийской разведки «Аистёнок»
Масса «Аистёнка» составляет 135 кг, дальность обнаружения огневых позиций миномётов — 5 км, движущихся целей — до 20 км, численность боевого расчёта — 3 человека, время перевода в боевое положение — 5 минут.
«Автоматика комплекса («Аистёнок». — RT) способна рассчитать параметры полёта артиллерийского боеприпаса калибра от 81 до 120 мм и определить точку старта либо место падения снаряда. Также система может использоваться для контроля стрельбы артиллерийских орудий калибра от 122 до 152 мм. В таком режиме радиолокационная станция засекает разрывы снарядов и вычисляет их местоположение», — говорится на сайте Минобороны РФ.
В свою очередь, в материалах «Рособоронэкспорта» отмечается безопасность эксплуатации «Аистёнка», наличие в нём современной элементной базы, а также возможность осуществления разведки в любое время суток и при отсутствии видимости вследствие неблагоприятных погодных условий (туман, дождь, метель, запыление или задымление).
2.3 Устройство Вторичной РЛС
Принцип действия вторичного радиолокатора несколько отличается, от принципа Первичной радиолокации. В основе устройства Вторичной РЛС лежат компоненты: передатчик, антенна, приёмник, сигнальный процессор (специализированный микропроцессор, предназначенный для цифровой обработки сигналов в реальном масштабе времени), индикатор и самолётный ответчик с антенной (бортовое приёмопередающее устройство летательных аппаратов, предназначенное для автоматической выдачи информационных посылок по запросному сигналу РЛС.).
Передатчик. Служит для излучения импульсов запроса в антенну на частоте 1030 МГц
Антенна. Служит для излучения и приёма отражённого сигнала. Для вторичной РЛС характерно то, что антенна излучает на частоте 1030МГц, и принимает на частоте 1090 МГц.
Приёмник. Служит для приёма импульсов на частоте 1090 МГц
Сигнальный процессор. Служит для обработки принятых сигналов
Индикатор. Служит для индикации обработанной информации
Самолётный ответчик с антенной. Служит для передачи импульсного радиосигнала, содержащего дополнительную информацию, обратно в сторону РЛС при получении радиосигнала запроса.
3. Применение РЛ
3.1 Военное применение
Одним из первых важных применений радиолокации были поиск и дальнее обнаружение в военных целях. Обратимся к истории: перед второй мировой войной Великобритания построила не очень совершенную, но довольно эффективную сеть радиолокационных станций дальнего обнаружения для защиты от внезапных воздушных налетов со стороны Ла-Манша. В наши же дни более совершенные радиолокационные сети защищают Россию и Северную Америку от внезапного нападения авиации или ракет. Корабли и самолеты также оснащаются радиолокаторами. Таким образом, стало возможным наведение истребителей на вражеские бомбардировщики с наземных радиолокаторов слежения или с корабельных радиолокаторов перехвата; можно также использовать бортовые самолетные радиолокаторы для обнаружения, слежения и уничтожения техники противника. Бортовые радиолокаторы важны для поиска, осуществляемого над сушей или морем, и оказания помощи в навигации или при слепом бомбометании.
Ракеты с радиолокационным наведением оснащаются для выполнения боевых задач специальными автономными устройствами. Для распознавания местности на самонаводящейся ракете имеется бортовой радиолокатор, который сканирует земную поверхность и соответствующим образом корректирует траекторию полета. Радиолокатор, расположенный поблизости от противоракетной установки, может непрерывно отслеживать полет межконтинентальной ракеты. За последние годы в обычные методы и средства радиолокации было внесено много нового – появилась, в частности, система для одновременного слежения за многими целями, находящимися на разных высотах и азимутах; кроме того, разработан способ усиления сигналов радиолокатора без увеличения фонового шума.
Океанские суда используют радиолокационные системы для навигации. На промысловых траулерах радиолокатор находит применение для обнаружения косяков рыбы.
На самолетах радиолокаторы используют для решения ряда задач, в том числе для определения высоты полета относительно земли. В аэропортах один радиолокатор служит для управления воздушным движением, а другой – радиолокатор управления заходом на посадку – помогает пилотам посадить самолет в условиях плохой видимости.
4. Технология СТЕЛС и связь ее с РЛ (РЛС).
СТЕЛС — технология снижения заметности. Поверхность самолёта собирают из нескольких тысяч плоских треугольников специального волнотталкивающего материала, следовательно:
Гражданское применение
В сельском и лесном хозяйстве радиолокационные устройства незаменимы при получении информации о распределении и плотности растительных массивов, изучении структуры, параметров и видов почв, своевременном обнаружении очагов возгораний. В географии и геологии радиолокация используется для выполнения топографических и геоморфологических работ, определения структуры и состава пород, поиска месторождений полезных ископаемых. В гидрологии и океанографии радиолокационными методами осуществляется контроль состояния главных водных артерий страны, снегового и ледяного покрова, картографирование береговой линии.
Радиолокация — это незаменимый помощник метеорологов. РЛС легко выяснит состояние атмосферы на удалении десятков километров, а по анализу полученных данных составляется прогноз изменения погодных условий в той или иной местности.

Первые радиолокационные устройство
Идея радиолокации немногим моложе идеи радиосвязи. 30 апреля 1904 года немецкий инженер Кристиан Хюльсмайер из Дюссельдорфа получил от Императорского бюро по патентам удостоверение на своё изобретение, названное телемобильскопом. Хюльсмайер предложил двухантенное устройство для обнаружения кораблей на большом расстоянии. Излучённый прибором сигнал отражался от объекта, принимался обратно и соответствующим образом обрабатывался. В состав аппарата входили радиопередатчик, вращающиеся антенны направленного действия, радиоприёмник со световым или звуковым индикатором, воспринимавший отражённые предметами волны.
При всём своем несовершенстве устройство Хюльсмайера содержало в себе основные элементы современного локатора. И уже 18 мая 1904 года аппарат был впервые испытан на кельнском железнодорожном мосту, а 10 июня — в роттердамской гавани.
Идея развивалась и в других заявках, многие из которых очень интересны. Так, в 1919 г. был выдан патент Л. Махтсу, в котором описывалось устройство со спиральной развёрткой и визуальной индикацией положения обнаруживаемого с помощью радиоволн объекта. Однако из-за несовершенcтва излучающих и принимающих устройств того времени возможностей практического осуществления предложенных идей не было.
В сентябре 1922 г. в США два экспериментатора, служившие в ВМФ, — Хойт Э. Тейлор и Лео К. Янг проводили опыты по радиосвязи на декаметровых волнах (3-30 МГц) через реку Потомак. В это время по реке прошёл корабль, и связь прервалась. Это натолкнуло их на мысль о применении радиоволн для обнаружения движущихся объектов. Несмотря на предположение Тейлора, что этот метод может быть использован в темноте и при плохой видимости, флот не сразу продолжил работу в этом направлении. В США именно Х. Тейлору и Л. Янгу приписывают открытие явления отражения радиоволн.
Спустя два года английские физики Э. Эпплтон и М. Барнетт по отражённому непрерывному сигналу измерили высоту слоя Хэвисайда. В этих опытах производилось измерение высоты ионосферы (слоя Кеннели-Хевисайда) путём наблюдения интерференции радиоволн, распространяющихся вдоль поверхности Земли, и волн, отражённых от ионосферы. Их работа считается первой публикацией описания опытов по определению положения отражающего радиоволны объекта.
Ещё через год американцы Г. Брейт и М. Тьюв провели эти измерения импульсным методом, а советские учёные Н. Мандельштам и Л. Папалекси к 1930 г. разработали теорию радиоинтерференционного измерения расстояний.
Журналы и бланки
БухгалтерияОхрана труда и техника безопасностиМЧСКадровая работа: Журналы, бланки, формыЖурналы, бланки, формы документов для органов прокуратуры и суда, минюста, пенитенциарной системыЖурналы, бланки, формы документов МВД РФ, РосгвардииКонструкторская, научно-техническая документацияЛесное хозяйствоПромышленностьГостиницы, общежития, хостелыСвязьЖурналы и бланки по экологииЖурналы и бланки, используемые в торговле, бытовом обслуживанииЖурналы по санитарии, проверкам СЭСЛифтыКомплекты документов и журналовНефтебазыБассейныГазовое хозяйство, газораспределительные системы, ГАЗПРОМЖКХЭксплуатация зданий и сооруженийЖурналы и бланки для нотариусов, юристов, адвокатовЖурналы и бланки для организаций пищевого производства, общепита и пищевых блоковЖурналы и бланки для организаций, занимающихся охраной объектов и частных лицЖурналы и бланки для ФТС РФ (таможни)Журналы для образовательных учрежденийЖурналы и бланки для армии, вооруженных силБанкиГеодезия, геологияГрузоподъемные механизмыДокументы, относящиеся к нескольким отраслямНефтепромысел, нефтепроводыДелопроизводствоЖурналы для медицинских учрежденийАЗС и АЗГСЭлектроустановкиТепловые энергоустановки, котельныеЭнергетикаШахты, рудники, метрополитены, подземные сооруженияТуризмДрагметаллыУчреждения культуры, библиотеки, музеиПсихологияПроверки и контроль госорганами, контролирующими организациямиРаботы с повышенной опасностьюПожарная безопасностьОбложки для журналов и удостоверенийАптекиТранспортРегулирование алкогольного рынкаАвтодороги, дорожное хозяйствоСамокопирующиеся бланкиСельское хозяйство, ветеринарияСкладСнегоплавильные пунктыСтройка, строительствоМетрологияКанатные дороги, фуникулерыКладбищаЖурналы для парикмахерских, салонов красоты, маникюрных, педикюрных кабинетовАрхивыАттракционы
Радар на борту
К идее использования радиолокационных средств на самолетах пришли несколько лет спустя после того, как появились первые наземные РЛС. Хотя в системах радионавигации и в приборах «слепой посадки» радиотехнические средства начали применяться уже с 1933 года.
В СССР именно наземная станция «Редут» явилась прототипом первой бортовой радиолокационной станции (БРЛС). Одной из основных проблем стало размещение аппаратуры на самолете – комплект станции с источниками питания и кабелями должен был весить примерно 500 кг. На одноместном истребителе того времени разместить такую аппаратуру было нереально. И выход был найден – разместить станцию было решено не на одноместном самолете, а на двухместном Пе-2.
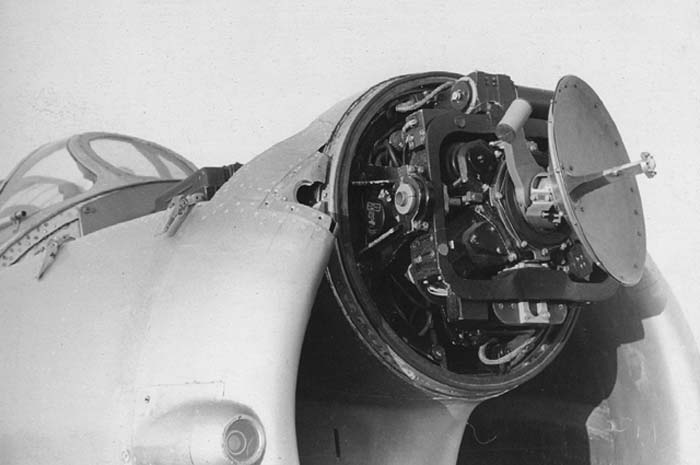
РЛС «Коршун» на МиГ-17П
Первая отечественная бортовая радиолокационная станция была названа «Гнейс-2», и в июне 1943 года она была принята на вооружение. К концу 1944 года было выпущено более 230 станций «Гнейс-2».
А в победном 1945 году началось серийное производство самолетной радиолокационной станции «Гнейс-5с». Дальность обнаружения цели достигала 7 км. Но главной новинкой этой модификации было то, что начиная с дальности 1,5 км данные воздушной обстановки дублировались на специальном индикаторе, установленном в кабине летчика. Это позволяло пилоту самостоятельно выводить самолет в атаку.
Дальнейшее развитие бортовых РЛС было связано с появлением реактивной авиации. Обнаружить самолеты и крылатые ракеты врага помогали такие установки, как «Изумруд», «Сокол» и «Сапфир» в различных модификациях.
История развития радиолокации
Идея радиолокации возникла практически сразу после открытия радиоволн. В 1905 году сотрудник немецкой компании Siemens Кристиан Хюльсмейер создал устройство, которое с помощью радиоволн могло обнаружить крупные металлические объекты. Изобретатель предлагал устанавливать его на кораблях, чтобы они могли избегать столкновений в условиях плохой видимости. Однако судовые компании не заинтересовались новым прибором.

Несмотря на то что англичане вступили в «радарную» гонку позже американцев и немцев на финише они сумели обогнать их и подойти к началу Второй мировой войны с самой продвинутой системой радиолокационного обнаружения самолетов.
Уже в сентябре 1935 года англичане приступили к постройке сети радиолокационных станций, в состав которой перед войной уже входило двадцать РЛС. Она полностью перекрывала подлет к Британским островам со стороны европейского побережья. Летом 1940 года британскими инженерами был создан резонансный магнетрон, позже ставший основой бортовых радиолокационных станций, устанавливаемых на американских и британских самолетах.
https://youtube.com/watch?v=055tx9viDhE
Работы в области военной радиолокации велись и в Советском Союзе. Первые успешные эксперименты по обнаружению самолетов с помощью радиолокационных станций в СССР были проведены еще в середине 30-х годов. В 1939 году на вооружение РККА была принята первая РЛС РУС-1, а в 1940 году – РУС-2. Обе эти станции были запущены в серийное производство.
Сигналу РЛС с фазированной решеткой можно придавать любую необходимую форму, его можно перемещать в пространстве без изменения положения самой антенны, работать с разными частотами излучения. РЛС с фазированной решеткой гораздо надежней и чувствительней, чем радиолокатор с обычной антенной. Однако у подобных радаров есть и недостатки: большой проблемой является охлаждение РЛС с ФАР, кроме того, они сложны в производстве и дорого стоят.

Новые радиолокационные станции с фазированной решеткой устанавливаются на истребители пятого поколения. Эта технология используется в американской системе раннего предупреждения о ракетном нападении. Радиолокационный комплекс с ФАР будет установлен на новейший российский танк «Армата». Следует отметить, что Россия является одним из мировых лидеров в разработке радиолокаторов с ФАР.
* * *
Появлением радиолокации можно считать рубеж XIX— XX веков. И по сути, этой области наук чуть больше века, но столь стремительное её развитие привело нас к тому, что мы уже не можем даже и представить своё существование без неё в нашем повседневном быту, что уж говорить о её военном значении. С развитием общества человеческие потребности растут всё больше. Следовательно, перед радиолокацией появляются новые задачи и новые направления, а значит, и усовершенствование методов, оборудования системы радиолокации. Не скоро к данной области будет потерян интерес, который подогревается и научным прогрессом, с одной стороны, и коммерческой заинтересованностью, с другой.
АФАР и «умная обшивка» для Су-57
Современные БРЛС обеспечивают обнаружение и сопровождение воздушных и наземных целей в режимах «воздух-воздух», «воздух-поверхность», а также радиокоррекцию, полетное задание и выдачу целеуказания на применение управляемого бортового оружия.
Одна из современных российских разработок в области радиолокации − первая отечественная бортовая РЛС с активной фазированной антенной решеткой (АФАР) «Жук-АЭ» для истребителя МиГ-35. В ней разработчики применили новейшие технологии в области радиоэлектроники, благодаря чему по соотношению эффективности к стоимости «Жуку» нет равных не только в России, но и на международном рынке.
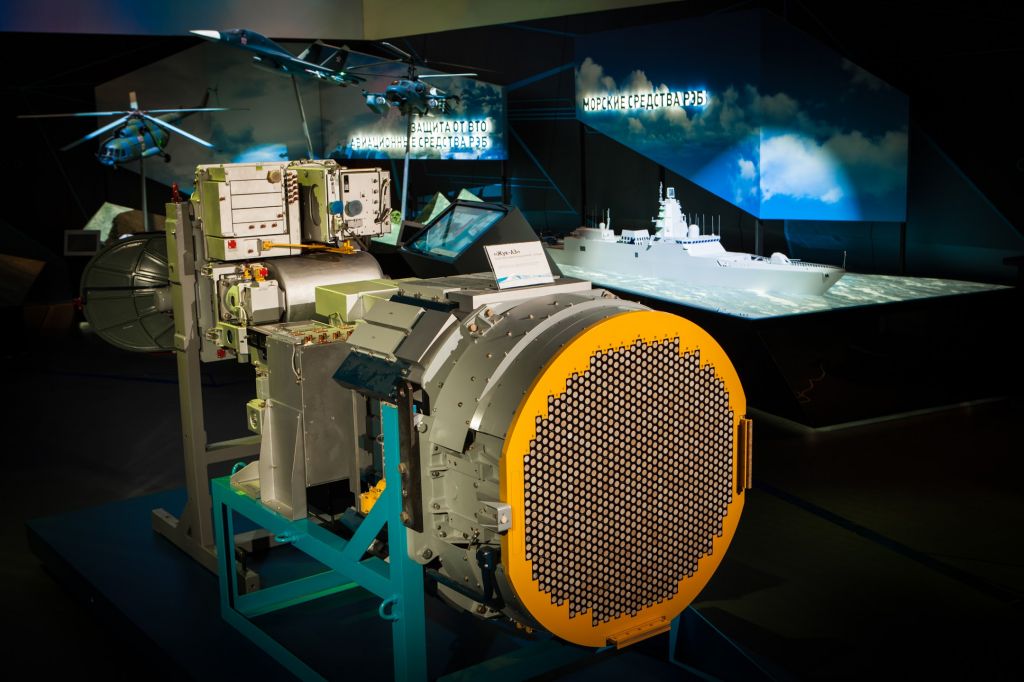
БРЛС «Жук-АЭ»
Антенны радиолокационной станции Н036 «Белка» для новейшего российского истребителя Су-57 также выполнены по технологии АФАР. Отметим, что наличие АФАР является одним из условных признаков истребителей пятого поколения.
В 2018 году российские истребители пятого поколения Су-57 получили так называемую «умную обшивку». Антенны станции Н036 «Белка» размещаются не только в носу машины, но и распределены по поверхности самолета, всего шесть, но точная конфигурация пока не разглашается. Неизвестна пока и большая часть характеристик радиолокационной системы Су-57. Но разработчики заявили, что в ходе летных испытаний станция Н036 «Белка» подтвердила заявленные параметры.
По оценке экспертов, такая «умная обшивка» обеспечит пилотам российского истребителя пятого поколения новые возможности, в частности круговой обзор на сотни километров. Использование антенн, работающих в разных диапазонах, также признано эффективным ответом американским стелс-технологиям.
Первые эксперименты: радиоволны в открытом море
Термин «радиолокация» происходит от двух латинских слов: «radiare», которое означает «излучать», и «locatio» – «размещение, расположение». Сложение этих двух слов позволяет трактовать, что радиолокация занимается определением местоположения различных объектов по излученным от них сигналам.
Это самое общее толкование слова «радиолокация». Более точной формулировкой будет следующая. Под радиолокацией понимают область радиоэлектроники, которая занимается разработкой методов и технических устройств (систем), предназначенных для обнаружения и определения координат и параметров движения различных объектов с помощью радиоволн.
С помощью радиолокации обеспечивается решение широкого круга задач, связанных с обнаружением воздушных и наземных объектов (целей), навигацией (обеспечением вождения) различных судов (воздушных и морских), с управлением воздушным и морским движением, управлением средствами ПВО, с обеспечением безопасности движения транспортных средств, с предсказанием возникновения погодных явлений, а также с поражением наземных (морских) и воздушных объектов в любое время суток и в любых метеоусловиях. Помимо этого, основываясь на принципах радиолокации, решаются задачи, связанные с диагностикой организма человека. Как видите, спектр задач, решаемых радиолокацией, достаточно широк несмотря на то, что радиолокация сравнительно молодое научное направление.

Самолет дальнего радиолокационного обнаружения и управления А-50У
Первые упоминания о возможности использования радиоволн для обнаружения различных объектов относятся ко второй половине 90-х годов XIX столетия. В частности, годом рождения радиолокации в России считается 1897-й, когда изобретатель радио Александр Степанович Попов, проводя свои эксперименты в открытом море по установлению связи с помощью беспроводного телеграфа, обнаружил эффект отражения радиоволн. Было это так. Летом 1897 года под руководством А.С. Попова в Финском заливе проводились испытания радиоаппаратуры, изобретенного им беспроволочного телеграфа. В испытаниях принимали участие два морских судна – транспорт «Европа» и крейсер «Азия». На данных судах были установлены приемная и передающая аппаратура, и между ними поддерживалась непрерывная радиосвязь.
Неожиданно между кораблями прошел линейный крейсер «Лейтенант Ильин». Связь между кораблями прервалась. Через некоторое время, когда «Лейтенант Ильин» прошел линию, соединяющую корабли, связь возобновилась. Это «затенение» было замечено испытателями, и в отчете А.С. Попова по результатам экспериментов было отмечено, что появление каких-либо препятствий между передающей и приемной позициями может быть обнаружено как ночью, так и в тумане. Так родилась радиолокация.
Принцип действия
Радиолокация основана на следующих физических явлениях:
- Радиоволны рассеиваются на встретившихся на пути их распространения электрических неоднородностях (объектами с другими электрическими свойствами, отличными от свойств среды распространения). При этом отражённая волна, также, как и собственно, излучение цели, позволяет обнаружить цель.
- На больших расстояниях от источника излучения можно считать, что радиоволны распространяются прямолинейно и с постоянной скоростью, благодаря чему имеется возможность измерять дальность и угловые координаты цели (Отклонения от этих правил, справедливых только в первом приближении, изучает специальная отрасль радиотехники — Распространение радиоволн. В радиолокации эти отклонения приводят к ошибкам измерения).
- Частота принятого сигнала отличается от частоты излучаемых колебаний при взаимном перемещении точек приёма и излучения (эффект Доплера), что позволяет измерять радиальные скорости движения цели относительно РЛС.
- Пассивная радиолокация использует излучение электромагнитных волн наблюдаемыми объектами, это может быть тепловое излучение, свойственное всем объектам, активное излучение, создаваемое техническими средствами объекта, или побочное излучение, создаваемое любыми объектами с работающими электрическими устройствами.
Физика процесса: эффект Доплера, или «умное эхо»
Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн.
Использование радиоволн, или, другими словами, электромагнитных колебаний (ЭМК), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц, определяет основные преимущества радиолокационных систем (РЛС) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми). В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
Основными закономерностями распространения радиоволн, которые позволяют обнаруживать объекты и измерять координаты и параметры их движения, являются следующие:
– постоянство скорости и прямолинейность распространения радиоволн в однородной среде (при проведении инженерных расчетов скорость распространения радиоволн принимают равной 3·10–8 м/с;
– способность радиоволн отражаться от различных областей пространства, электрические или магнитные параметры которых отличаются от аналогичных параметров среды распространения;
– изменение частоты принимаемого сигнала по отношению к частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера, который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.

Доплеровский метеорологический радиолокатор
В 1848 году эффект Доплера был уточнен французским физиком Арманом Физо, а в 1900 году – экспериментально проверен русским ученым Аристархом Белопольским на лабораторной установке. В этой связи в научно-технической литературе наименование данного эффекта можно встретить под названием «эффект Доплера – Белопольского».
Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал. Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость распространения радиосигнала в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения зондирующего сигнала t и момент приема отраженного сигнала от цели t1. В результате разность (t1 – t) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t) в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство 2Д = Сtд, из которого следует, что дальность до объекта (цели) равна Д = Сtд/2.
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tд, которое при известной скорости распространения радиоволн позволяет определить дальность до нее.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т.д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Методы и оборудование
Все средства радиолокации по используемому методу разделяют на РЛС непрерывного и импульсного излучения.
Первые содержат в своем составе передатчик и приемник излучения, действующие одновременно и непрерывно. По этому принципу были созданы первые радиолокационные устройства. Примером такой системы могут служить радиоальтиметр (авиационный прибор, определяющий удаление летательного аппарата от поверхности земли) или известный всем автолюбителям радар для определения скоростного режима транспортного средства.
При импульсном методе электромагнитная энергия излучается короткими импульсами в течение нескольких микросекунд. После генерации сигнала станция ведет работу только на прием. После улавливания и регистрации отраженных радиоволн РЛС передает новый импульс и циклы повторяются.
Расширение возможностей
Как отмечают аналитики, развитие системы загоризонтной радиолокации — часть усилий радиотехнических войск Воздушно-космических сил России в рамках радиолокационной разведки в целом.
Для наращивания возможностей «по контролю использования воздушного пространства» России были созданы и уже применяются новейшие образцы радиолокационного вооружения, в частности комплекс «Наблюдатель ФСР и КВП», сообщил начальник радиотехнических войск Воздушно-космических сил РФ.
«Комплекс автоматических средств наблюдения и обработки информации о воздушной обстановке «Наблюдатель ФСР и КВП» предназначен для контроля использования воздушного пространства, обеспечения полётов воздушных судов и является первой в истории радиотехнических войск системой, в составе которой работают автоматические радиолокационные модули, не требующие участия операторов», — отметил Андрей Кобан.

- Российские военнослужащие радиотехнических войск на учениях
- РИА Новости
По словам генерал-майора, «возможности каждого радиолокационного модуля позволяют в автоматическом режиме вести радиолокационную разведку в радиусе до 450 км».
«В состав радиолокационного комплекса может входить до 20 модулей, что позволяет в автоматическом режиме контролировать полёты авиации над территорией площадью до 300 тыс. кв. км. Применение комплекса «Наблюдатель ФСР и КВП» совместно с системой обработки информации «ВКАО-М» позволяет существенно повысить уровень автоматизации процессов контроля воздушного пространства Российской Федерации», — заявил он, добавив, что такие комплексы уже «развёрнуты в границах Центрального промышленного района страны, где интенсивность воздушного движения наиболее высокая».
Кроме того, Кобан сообщил, что «продолжается работа по усилению контроля воздушного пространства в Арктической зоне и на востоке страны».
«В этом регионе несут боевое дежурство подразделения РТВ, оснащённые современными комплексами средств автоматизации «Фундамент-М» и РЛС дежурного и боевого режима, такими как «Небо-М», «Подлёт», «Каста-2-2», «Сопка» и другие», — отметил генерал-майор.
Ранее Минобороны сообщало, что два радиотехнических полка объединения ВВС и ПВО Центрального военного округа получили в этом году модернизированную подвижную радиолокационную станцию П-18РТ «Терек». Как уточняло оборонное ведомство, РЛС «позволяет в автоматическом режиме обнаруживать цель, отслеживать её координаты, а также пеленговать устройства постановки помех, определять их тактико-технические характеристики и выдавать информацию на командный пункт».
Также по теме

Преграда для невидимок: какими возможностями обладает российская РЛС «Прима»
«Рособоронэкспорт» начал продвижение на внешний рынок высокомобильной радиолокационной станции разведки и целеуказания «Прима». По…
В конце 2019 года в радиотехнические войска объединения ВВС и ПВО Восточного военного округа поступила радиолокационная станция 19Ж6П.
«Эта РЛС предназначена для обнаружения, опознавания и сопровождения воздушных целей, в том числе крылатых ракет, при воздействии активных и пассивных помех, а также отражений от земной поверхности и метеообразований», — говорилось в сообщении Минобороны.
Отмечалось также, что в новой станции была в том числе «увеличена дальность обнаружения воздушных объектов, введены новые режимы работы, выполнена автоматизация процессов сопровождения, инициализации и сопровождения целей».
По словам Ивана Коновалова, для создания эшелонированной системы обороны у России имеются все средства и наработки.
Михаил Ходарёнок, в свою очередь, добавил, что в перспективе всеракурсное радиолокационное поле будет обеспечено именно станциями загоризонтного обнаружения.
«Это существенно увеличит возможности радиотехнических войск, в том числе по ведению радиолокационной разведки», — заключил он.